使用Solidworks Motion插件可以对机构进行运动学/动力学仿真。机构约束添加完成后,可以在主动部件(关节)处添加马达进行驱动。运动可以是简单的匀速运动或者复杂的表达式、数据点形式的运动。
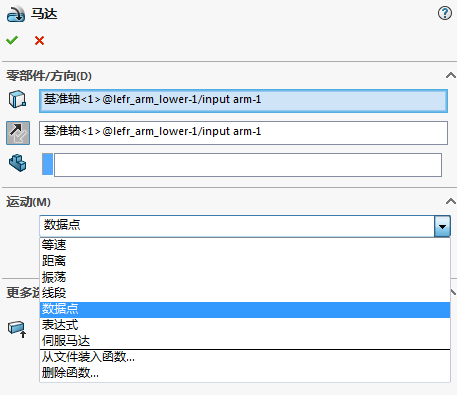
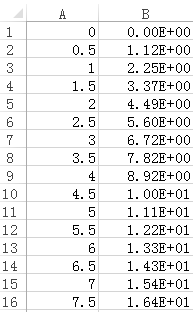
下面采用自定义数据点来驱动主动关节。点开编辑按钮会弹出对话框,可以手动添加数据点,也可以从txt、CSV文件中导入。第一列为自变量,第二列为随自变量变化的值。如下表中第一列为时间(间隔为0.5s),第二列为与时间对应的关节转动角度:
第二列还可以根据实际情况选为速度或加速度。如下图所示,导入CSV数据后自动生成了位移、速度等随时间变化的曲线,时间从0~16秒:
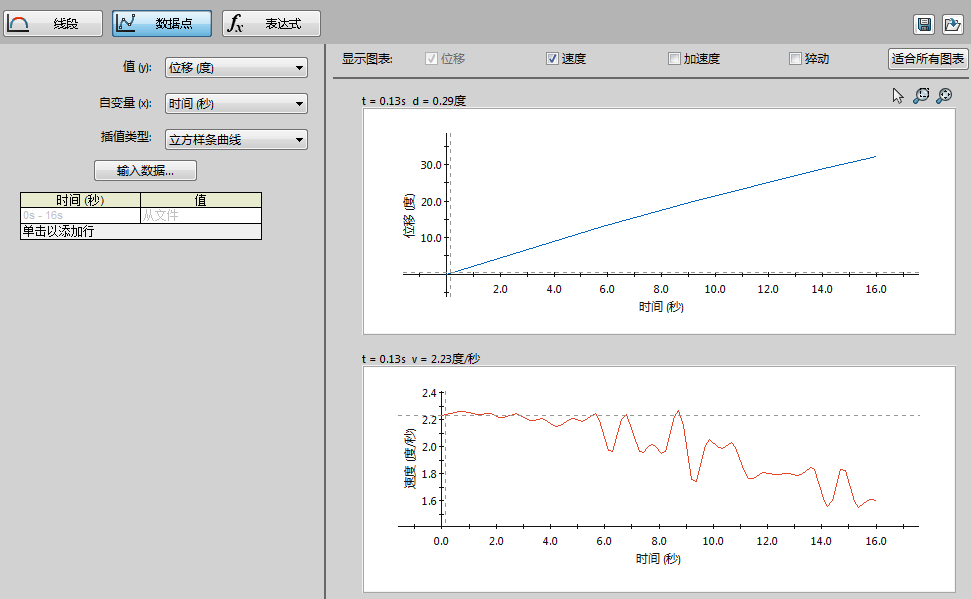
将键码拖至16s处,点击计算按钮。Solidworks Motion会根据给定的输入和机构的约束计算出每个部件的运动状态。

由于Solidworks中装配体约束的功能十分强大,因此可以用来验证一些复杂机构的运动学正、逆解。在其它软件中根据推导出的逆解计算公式输出关节位移后导入Solidworks中进行验证。比如在逆解计算中让控制点沿着某一坐标轴移动,将结果导入Solidworks中进行验证,可以发现末端确实沿着期望的直线运动: